
 Seonglae Cho
Seonglae ChoInertial navigation system
GPS의 절대적 위치의 오차를 줄이는 상대적 힘 이용 시스템
IMU를 이용하여 이동체의 위치를 분석하는 시스템
IMU로 자세측정 데이터를 얻고 이동거리와 합해서 분석
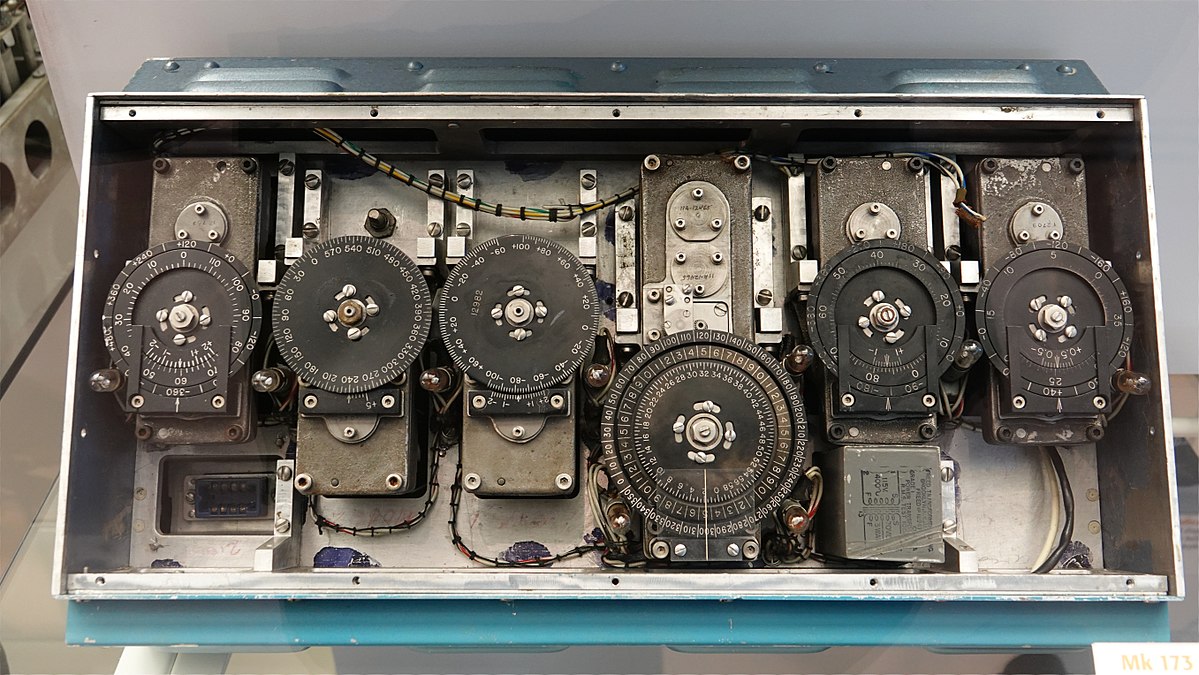
IMU관성항법 장치
관성항법장치에는 자이로와 가속도계가 기본으로 들어간다
잠수함, 항공기, 미사일 등에 장착하여 자기의 위치를 감지하여 목적지까지 유도하기 위한 장치이다
동작원리는 자이로스코프에서 방위 기준을 정하고, 가속도계를 이용하여 이동 변위를 구한다
GPS는 INS를 보정하기 위한 보조수단인 경우가 다반사
GPS라는 마법과도 같이 값싸면서도 정밀한 위치 측정장치가 등장하면서 INS의 오차를 매우 손쉽게 보정할 수 있게 되었
관성항법장치
관성항법장치(Inertial Navigation System, INS)는 잠수함, 항공기, 미사일 등에 장착하여 자기의 위치를 감지하여 목적지까지 유도하기 위한 장치이다. 동작원리는 자이로스코프에서 방위 기준을 정하고, 가속도계를 이용하여 이동 변위를 구한다. 처음 있던 위치를 입력하면 이동해도 자기의 위치와 속도를 항상 계산해 파악할 수 있다.
https://ko.wikipedia.org/wiki/%EA%B4%80%EC%84%B1%ED%95%AD%EB%B2%95%EC%9E%A5%EC%B9%98
관성항법(INS) vs 위성항법(GPS), 그 멀고도 가까운 사이
먼 옛날 낯선 곳을 찾아가거나 망망대해를 항해할 때는 별자리를 이용했습니다. 정확한 길을 모르니 가려는 방향을 어림잡아 길을 만들면서 가야 했을 겁니다. 나침반과 지도가 등장한 이후에는 자신과 목적지의 위치를 조금 더 정확하게 파악하고, 남은 거리와 시간까지 어느 정도 예상할 수 있었습니다. 20세기에는 스스로 계산해 목표물을 찾아가는 자동항법장치가 개발되어 항법사나 여행자들의 길잡이 역할을 하고 있습니다.

https://m.blog.naver.com/PostView.nhn?blogId=karipr&logNo=221581138007&proxyReferer=https:%2F%2Fwww.google.com%2F
namu.wiki
https://namu.wiki/w/INS