
metric learning
domain adaptation
학습 과정 변화라는 정의를 데이터로부터 배우고
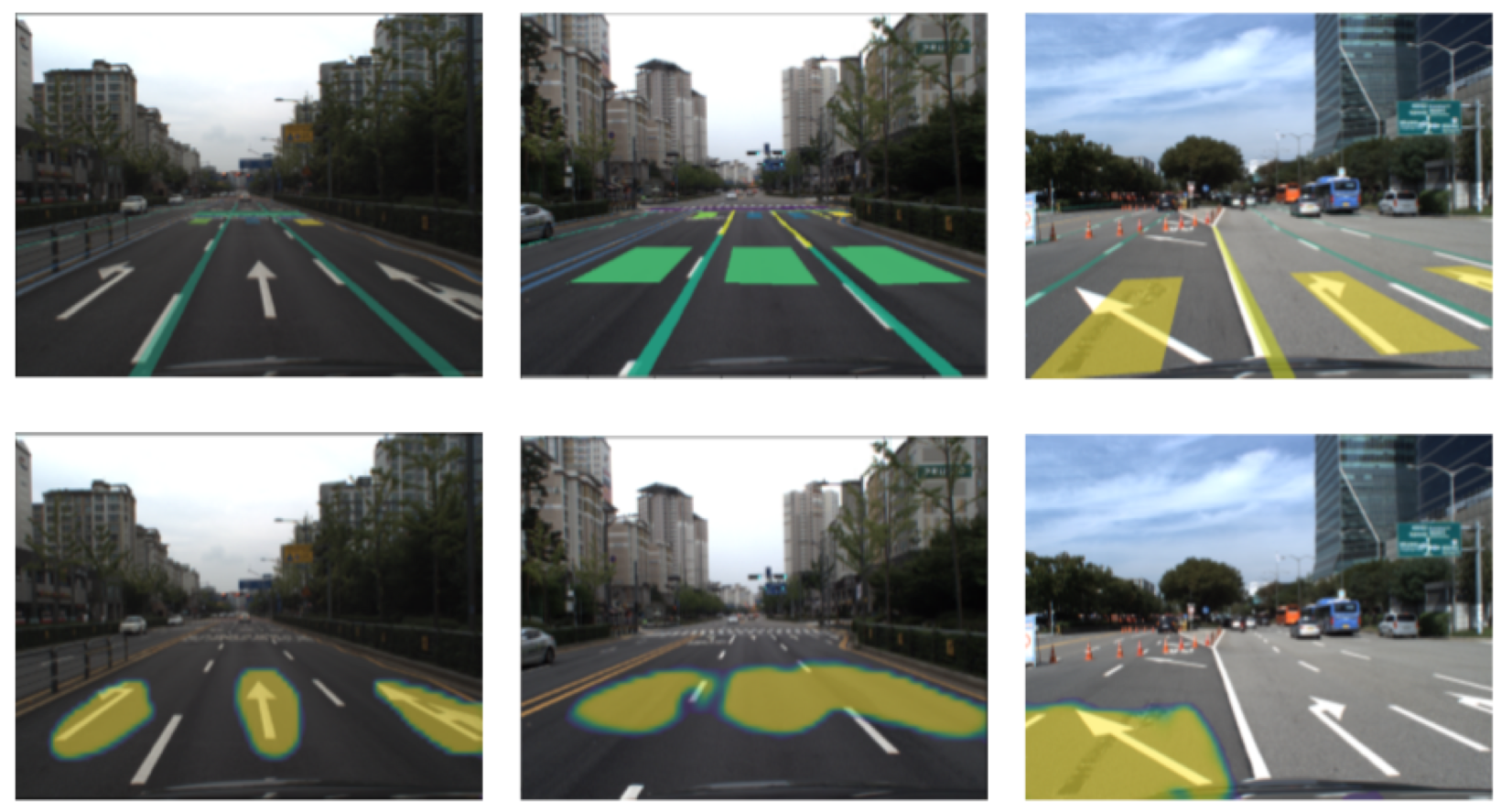
pose error와 Occlusion극복
딥러닝을 이용한 도로 HD맵의 변화 탐지 기술
우리가 지도를 통해 내 위치를 파악하고 목적지를 찾아가는 것처럼, 도로 위 머신들이 움직이기 위해 가장 우선적으로 필요한 데이터가 있습니다. 바로 공간의 고정밀 데이터, HD맵입니다. 자율주행 머신이 내 위치를 파악하고(Localization), 현재 상황을 인지하고(Perception) 목적지까지의 경로 설정(Decision making & Planning)을 가능하게 하는 가장 중요한 데이터입니다. HD맵 또한 결국 '지도'이기 때문에 지도가 가지는 숙명적인 문제에서 자유로울 수 없습니다.

https://www.naverlabs.com/storyDetail/190
Computer Vision For Autonomous Driving
NAVER Search | Computer Vision For Autonomous Driving - 행사: 2021 NAVER Search Colloquium Global Re:Search - 발표일: 2021년 5월 7일 - 발표자: 김지원 Jiwon Kim (NAVER LABS)
https://tv.naver.com/v/20312270/list/709884
