Seonglae Cho
Seonglae ChoGNSS mapping: GNSS로 points map 만들기
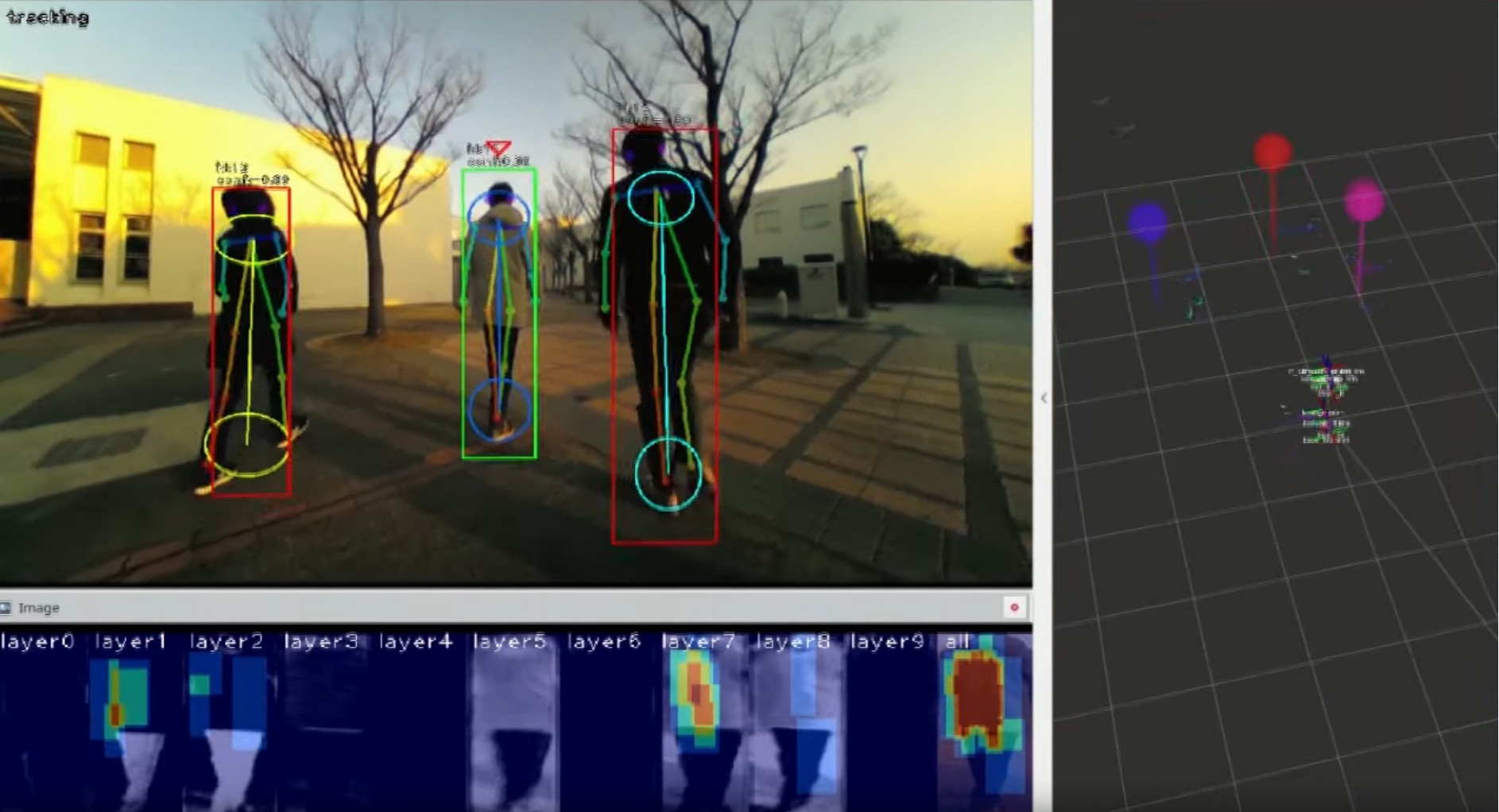
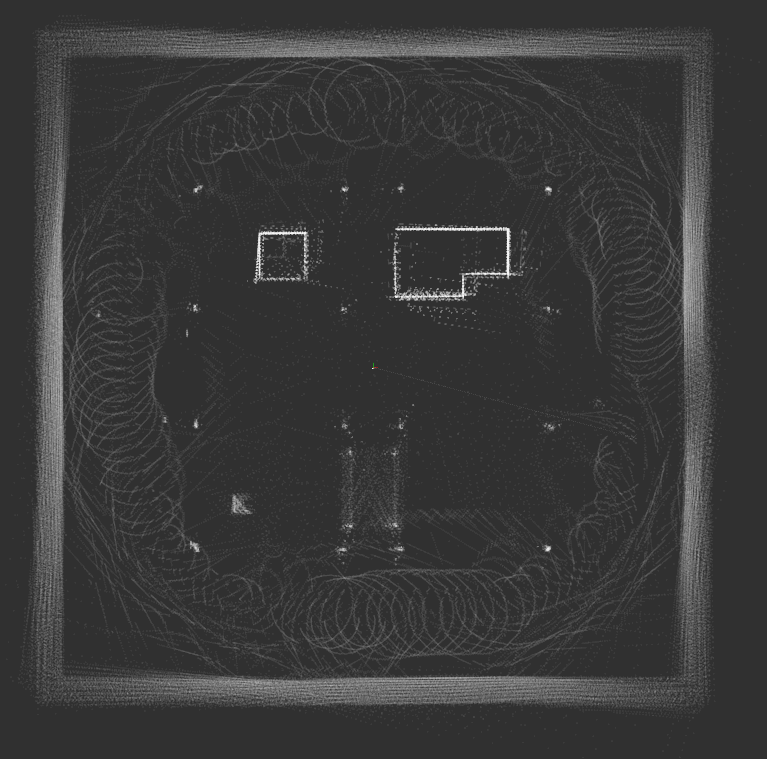
자율주행을 위해서는 현재 차량의 위치를 지도 상에서 특정하는 localization이 필요하다. localization은 단순히 GNSS를 통해서도 수행할 수 있지만, 오차가 있을 수 있어 대부분은 points map과 LiDAR에서 받아온 3D points 정보를 align (matching)하여 localization을 수행한다. (LiDAR만 쓰는 것도 한계가 있어 GNSS, IMU 등을 종합하여 사용하기도 한다) LiDAR 기반 localization은 센서의 성능도 중요하겠지만, points map에 matching을 하는 것이기 때문에 map의 quality도 매우 중요하다.

https://velog.io/@spiraline/gnssmapping
GNSS-mapping
Spiraline • Updated 2022 May 25 6:24
Kenji Koide
Research Scientist Mobile Robotics Research Team (MR2T) National Institute of Advanced Industrial Science and Technology (AIST)
https://staff.aist.go.jp/k.koide/